就是閒聊,純粹分享這科技手網的發想與實作過程。
話說手網烘焙咖啡將近6年多,一直是眼觀鼻聞的方式,最多就是手機碼錶看轉黃與一爆時間。這算是相當隨性的做法,雖然有幾次的成果讓人驚艷,但是大部分烘焙出來的咖啡風味都是普普的,很難拿捏與複製好喝好風味的手搖方式。
在某個機會看到這套軟件工具Artisan真的被感動到!!!
竟然有神人開源並且是跨Windows、MacOS、Linux而且支持全球眾多咖啡烘焙機的超級好物,感謝這神人作者群~~
既然有這好物,那如何跟手網結合?
為什麼要結合手網?

這麼堅持用手網有幾個因素:
- 家裡有限的空間
- 業餘消磨時間,不是營業沒必要買貴森森的烘焙機
- 喜歡最簡單原始的烘焙方式,有趣好玩優先
那為何要搭配科技的方式用Artisan?
- 想知道,不同手搖方式與火源遠近的豆子溫度變化
- 可以記錄不同手搖方式,事後容易分析與比較各種手搖的溫度曲線與風味變化
- 提升一點烘焙專業
首先,Artisan結合手網有幾個關鍵要分析:
- Artisan支援什麼方式接收溫度計的訊息?
- 用什麼型號的溫度計?
- 溫度計的探針如何安置可以真正接觸到咖啡豆?
- 用筆電跑Artisan? 有線或無線?
不賣關子,先展現我這個首創(2022-03-20,在網上沒看到類似的作品)的科技手網,運用RPi4B+7”觸摸屏,Max6675模組連接K-type的溫度計探針,探針有實際接觸到手網內的咖啡豆。


咖啡烘焙成果~~
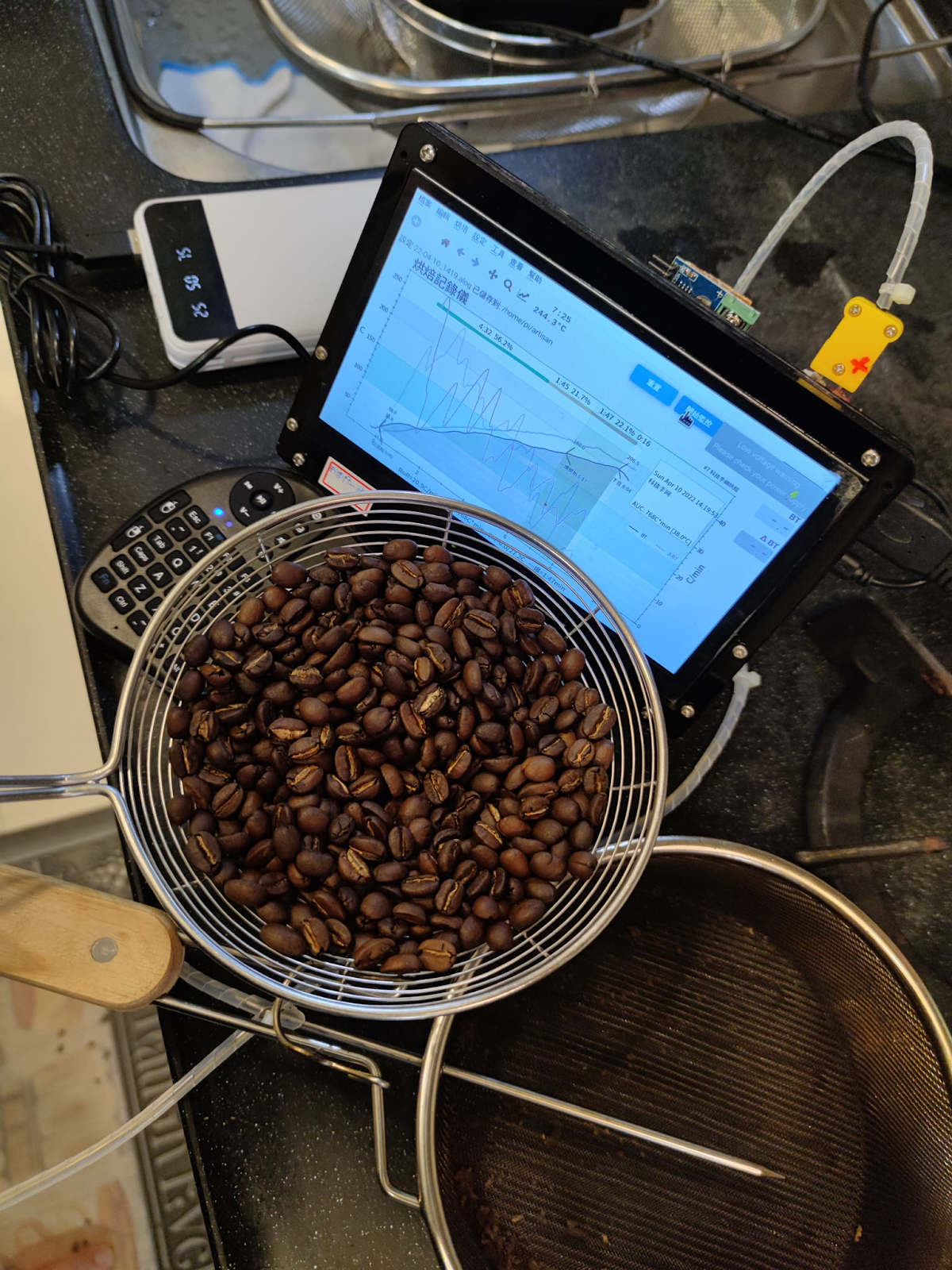

2022-04-05
精彩內容如何實作這台設備?
待續。。。











































