有關同好的問題:
1. Q: Arduino Mino Pro 如何控制 12個 Servo?
A: 請參考: http://arduino.cc/en/reference/servo
The Servo library supports up to 12 motors on most Arduino boards
The Servo library supports up to 12 motors on most Arduino boards
2. Q: Power的問題如何解決?
A: 因為servo蠻吃電,如果12個servo同時active時會需要超過3A(與Robot身體的重量有相依性),所建議購買DC﹣DC的module可以輸出5V電流3A以上。控制運動時,Coxa的4顆servo有需要再active可以有效降低電流需求。
3. Q: 如何做到無線遙控?
A: 我是用HC-06 Bluetooth module與Arduino用uart﹣Tx/Rx對接,記得要交錯。
HC-06 Arduino
﹣﹣﹣﹣﹣﹣﹣﹣﹣﹣
Tx ﹣﹣﹣﹣﹣》Rx
Rx《﹣﹣﹣﹣ Tx
4. Q: 機構的 3D 列印件是否可以分享?
A: 建議從這裡開始,他有提供SCAD檔,比較容易改為你需要的尺寸大小。
http://www.thingiverse.com/thing:50125/#files
5. Q: 有無Leg-IK與Body-IK的相關資料與source code?
A: 請參考幾位先進的blog:
IK 計算 ﹣ Oscar Liang:
http://blog.oscarliang.net/inverse-kinematics-and-trigonometry-basics/
4. Q: 機構的 3D 列印件是否可以分享?
A: 建議從這裡開始,他有提供SCAD檔,比較容易改為你需要的尺寸大小。
http://www.thingiverse.com/thing:50125/#files
5. Q: 有無Leg-IK與Body-IK的相關資料與source code?
A: 請參考幾位先進的blog:
IK 計算 ﹣ Oscar Liang:
http://blog.oscarliang.net/inverse-kinematics-and-trigonometry-basics/
NUKE source code - ArbotiX
https://code.google.com/p/arbotix/wiki/NukeIntro
用Blender規劃步態﹣ 機器人
https://www.youtube.com/watch?v=D7prFvG06fI
https://code.google.com/p/arbotix/wiki/NukeIntro
用Blender規劃步態﹣ 機器人
https://www.youtube.com/watch?v=D7prFvG06fI
《本文》
這幾周在試新的gait時遇到coxa的關節很不牢靠會晃動,
造成運動不順暢。
到YouTube參考很多同好的設計,開始執行升級計劃。
這次升級著重在Coxa關節的部份,
還有把重心調低讓整個機體可以站得穩定。
如下圖,因為電池體積大,
降低位置並且可以長出支架來支撐Coxa的關節。

身體部份4邊用螺絲固定。

支撐Coxa的關節,經過測試後非常穩定與結實!

電路的部份,把power module換更小的module,讓電路板空間縮小。

順便試試把Tibia設計成曲線看看效果如何。。。

嗯,整體看起來蠻紮實的!
《正視圖》

《俯視圖》

《底視圖》

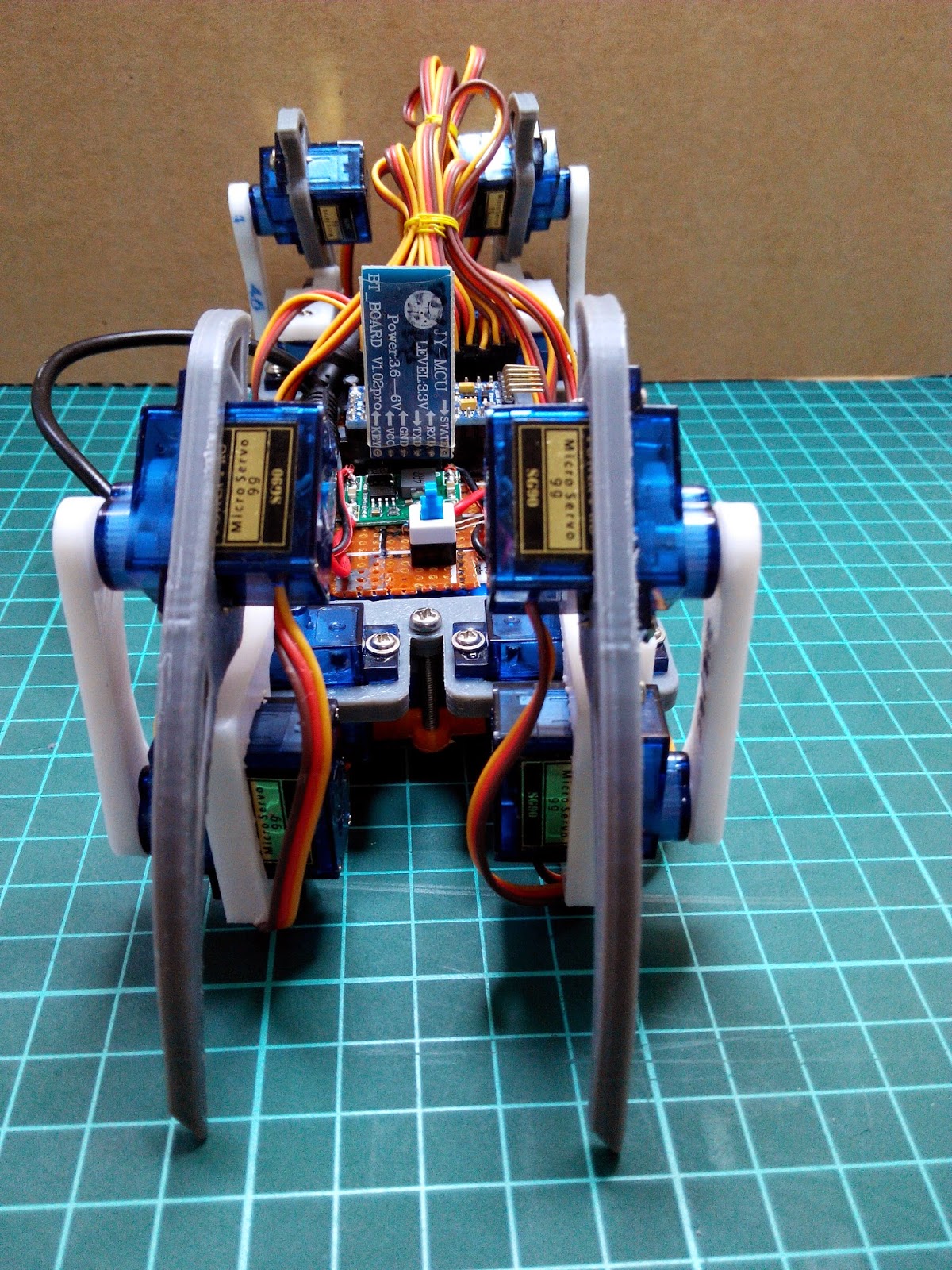
《正面圖》
《縮腳俯視圖》

《側視圖》

《簡易電路圖》

腳步gait的演算法持續改良。不過,年底了,好多公事要做。。。
您好,能否再具體說明如何控制12個伺服馬達呢?看了文章後不是很了解~謝謝
回覆刪除我有分享電路圖與source code,看code應該很容易理解。
刪除http://www.instructables.com/id/DIY-Spider-RobotQuad-robot-Quadruped/